Distributed snapshot
1 背景
这篇文章是介绍Chandy和Lamport关于做分布式系统中snapshot的算法。原论文题为:《Distributed Snapshots: Determining Global States of Distributed Systems》
提到snapshot,我们想到的是为了容错,把状态记录到磁盘里面;然而这里的snapshot要有所区别,指的是整个系统的一个状态;相当于我们开了上帝视角,对着整个系统瞄了一眼,得到一个整体的状态。程序需要用这种状态去做一些判断或者计算。比如检测死锁,需要先有一个全局的信息,拿到这个快照之后再进行检测。
而一般意义上的状态,包括两个部分,节点状态和网络状态。节点状态很好理解,就是每个进程运行到什么程度;网络状态就是在快照的一瞬间,有哪些message在网络上飞。
然而困难之处在于,没有个global clock同步。比如一个naive方法,一个node发送snapshot的请求,所有节点停下来,然后返回一个ack,之后再统一进行snapshot。这样做的问题是,没有办法界定正在网络上飞的信息。如A机器发了n个信息,然后收到请求,停下来;同时B机器收到请求停下来,但是此时系统无法记录这n个信息。
因此,我们可以得出结论:没有一个观察者,可以一次性观察所有的node,得到一个snapshot,必须有多个观察者,得到多个snapshot,然后拼成一个;第二因为同步问题,并不能得到一个精确时间点上的snapshot。
然而这种拼凑的snapshot是有意义的。我们定义一种stable property,指的是某一个函数y,对于状态S,y(S)成立的话,对于所有的S’也成立,其中S’是由S转化得到的。典型的stable property有“运算结束了”(不可能结束之后又开始对吧),“系统死锁了”(死锁了不会自己开的)。所以在后文中,我们只要找到一个S’是当前全局状态S,通过某种执行可以达到的结果,那么也是有意义的。
2 系统模型
前面啰嗦了一大堆,就是为了普及一下背景知识。下面用一种比较严肃的语言,对系统模型进行精确的表述。
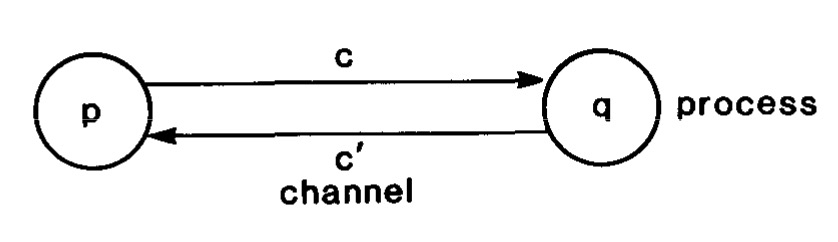
一个分布式系统由有限个process和有限个channel构成;channel是一个有向图,指的是两个进程之间的信息传递的通道。我们给出一下几种假设:
- process上做 snapshot local state 是原子的
- 任意$n_1, n_2$,都会有一个道路(channel的集合),从1到2.
- process正常工作;
- channel正常工作;
- channel上的信息发送是FIFO
而process是由一系列状态和event定义的。状态很好理解,我们看一下event的状态。Event < p,s,s’,M,c>,其中:
p: process,s: 发射之前的状态,s’: 发射之后的状态,M: Message,c: channel
而整个系统的状态:S = $Us_n+Us_c$,也就是说所有的node的状态和所有channel状态的合集。
我们可以这么看整个系统,就是在event的驱动下,从一个状态转移到另外一个状态。可以据此画出状态转换图,可以是确定性的,也可以是不确定性的。这和单机的状态转换图并没有本质的区别。
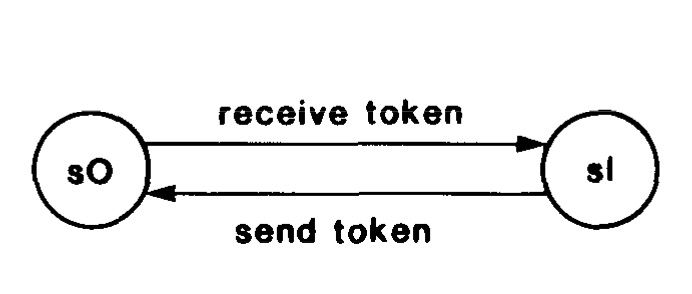
原文举了两个例子(本来不想赘述,但是和下文算法的获得有关),这里解释一个token的例子。下面两张图,分别描述了系统的结构和转化方式。首先两个process和两个channel,很好理解;然后每个process有两种状态,S0的时候需要接受一个token,然后变成S1;S1可以放弃token,然后变回S0。只有这两个变化方式。如果初始系统两个process,一个处于S0,一个处于S1,channel为空,那么可以得到一个确定性的状态转化图。
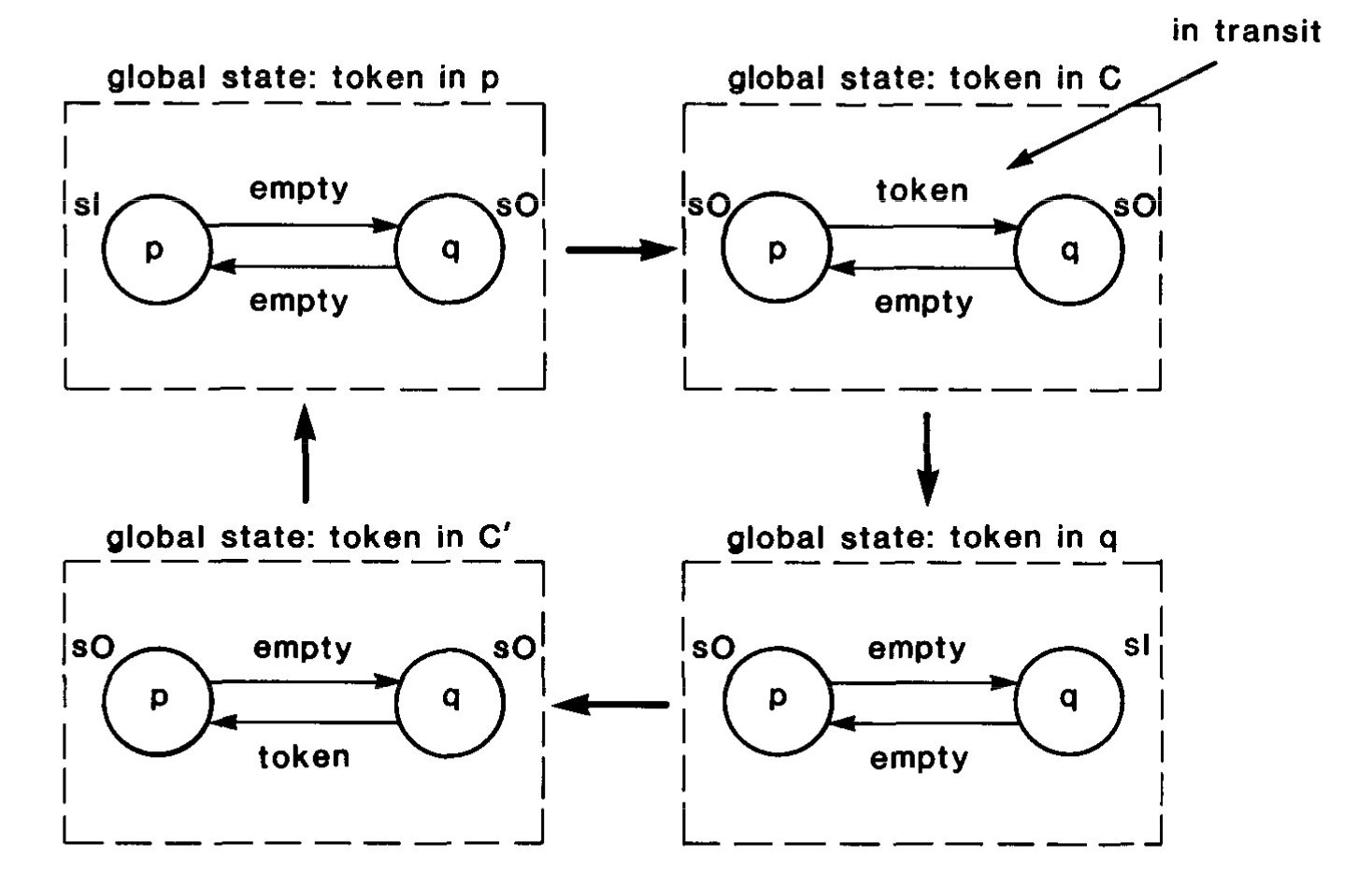
也就是说,开始的时候token在p上,p为S1;然后token被p释放,传到了channel c上,p变为S0;然后token传到了q上,q变为S1;最后q再把token还给p。
3 算法
3.1 想法的来源(很拗口,可以直接略过)
我们回到上面那个token的例子。因为没有一个统一的系统时钟,所以各个部分的snapshot不是同一时间完成的。我们假设这样一个场景:token在p上的时候(也就是第一幅图),在p上做一个snapshot;然后p发送token到了c(第二幅图)上,此时对c,c’已经q做一个snapshot。把这几个snapshot集合起来,我们发现,p和c上都有token,而这种状态是永远不可能出现的。(即不可能有现有状态转化过来)
- 再仔细分析一下原因。我们假设p在进行snapshot之前,发送了n个信息;而c在snapshot之前,它的来源发送了n’个信息。上文出现的问题,就是因为n’ > n。
- 反过来。token在p上,我们对c做一个snapshot;然后等到token发送到了c上,再对p,q,c’做一个snapshot;这时候,我们发现整个snapshot没有任何token,这种状态显然也是不正常的。而不正确的原因是 n’ < n。
- 我们就可以得到一个结论,为了让snapshot正确(即reachable frome某个真实存在的状态S),必须保证 n == n’。
- 上面关于channel的讨论,都是来源的process和channel的关系;同理,设q在snapshot之前,接受了m个信息;而c在snapshot之前,向q发送了m’个信息,我们也可以得到结论,m == m’。
- 又因为 $n^{\prime} \geq m^{\prime}$,$n \geq m$
(好吧,我承认这一段很拗口,我自己看的时候也很费劲。可以对照上面那张图仔细看,下面这一段更拗口)channel记录的数据,必须是发送者record之前发送的数据,减去接受者record之前,收到的数据。只有这样,在c被record的时候,它看到的n’实际上分成两个部分,一个是m’,另外一个是自己记录下来的n’-m’个信息。所以说n’==n。是这么理解的。而m’==m就更好理解,因为c只记录大于m’的信息,就是说我知道这部分信息在channel上传,但是没有被接受。
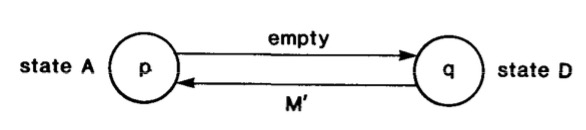
为了方便理解,我画了一张简图。(不要喷图丑,将就着看吧)。这实际上很好的反应了一种状态。p发了n个信息,q收到了m个信息,而n-m个信息正在c上。这时候把阴影部分的信息记录下来,整个snapshot才是合理的。
举个例子,如果n’==m’,那么整个channel一定会是空的,这个很简单;而n’>m’,那么channel必须记录下来(m’+1),(m’+2),…,(n’)个信息。
有了这个概念之后,我们开始想如何设计一个合理的算法,我第一反应是下面的思路:
- p在record的时候,立刻不再发信息了,同时记录下来c上的信息(c为空),那么我可以保证n == n’。
- 然后发送一个marker过去,q收到的时候,做一次record;因为channel上面是FIFO,所以这个marker信息肯定在其他信息到达之后才到达。也就是说,m==n。此时在q上做一个snapshot,可以保证 m == m’。
但是这样是有问题的,为啥呢。因为接受到marker的process,有可能已经record了。那么可能会有这样一个回路,$P_1->P_2->…->P_i->P_1$在$P_1$record的时候,$P_n$肯定也在往channel上发东西。等到$P_n$record的时候,再记录n到1这个channel上为空,但是相对于这个channel,m’肯定大于m了,因为1 record之后到n record之间所有的信息都是m’和m的差值
然而,lamport他们想了另外一个方法:
- p在自己record之后,并没有record channel,只是在channel上发送了一个marker。
- q在自己record之后,收到了来自某个channel的信息,缓存下来,直到收到来自该channel的marker,然后把这一段时间内缓存的message全都作为c的记录。也就是说,每个channel归自己指向的那个process管理。
我们讨论一下这种算法是否满足前面说的条件。首先关于n和n’,在c被record的时候,说明q已经收到了marker,然后marker之前的所有信息,c上都有,也就是c知道p发了n条信息,n==n’;同理,c没有记录m以内的值,因为c在record的时候,c知道m以内的被q收到了。所以m’==m。
ps: 上面的话我能看懂,但是为啥lamport他们就能相出这种算法我是没明白。从上面四个条件,到这个算法,跳的略微有点大。
3.2 具体算法
其实上面介绍的意见基本差不多了。主要就是两个规则:
- Marker-sending Rule: 一个process,一旦record自己的状态之后,对于每个出边的chanel,立刻发送 Marker到channel上。
- Marker-receiving Rule: 收到某个Marker的时候,如果没有snapshot:snapshot,同时record该channel为空;
如果已经snapshot,记录channel c为一个message queue,里面包括自己snapshot之后到收到marker之前的信息。
而说明该算法可以有限时间内完成就很简单了,可以理解为BFS?,类似于一个广播,只要能连通的点,肯定能收到marker。而每个节点收到了marker之后会record自己和入边的channel,这样的所有的节点和channel都被record了,一个完整的snapshot就此实现。
3.3 算法的终结
我们可以看到,每个node至多record自己一次;对于每个channel,注定会被它的出边record一次;所以所有的节点和所有的channel最终会被记录一次。而marker是不断传播的,所以算法最终会结束。
4. 算法的正确性
实际上,我们简单地对着这个算法,做一遍token那个例子,从p开始,
- p发出一个token,然后发一个marker,record自己;
- q收到token,然后发回给p;
- q发token给p之后收到marker,record自己,同时把上面的channel记录为空;
- p收到了token,缓存下来,然后收到了marker,这时候把token记录到下面的channel上。结束。
如下图所示,可以发现,最终得到的snapshot就是中间的某一个状态。
然而,有时候snapshot并不是其中任意一个状态。但是:这个snapshot可以由开始状态经过某些步骤得到;而由这个snapshot经过有限的步骤,也可以得到最终的状态!
系统的初始状态是一样的。然后从上帝视角来看,由一系列确定有序的event,驱动整个系统:$seq = (e_i, 0 \leq i)$, 假设i个event的时候,我们想要snapshot;第n个event的时候,系统终结。也就是说,snapshot的过程其实就是发生在i到n之间。
然后我们可以找到一个$S^*$,使得:
- $S^*$可以从$S_i$ 转化得到;
- $S^*$可以转换得到 $S_n$。
实际上我们只需要证明,有另外一个event的序列,和seq所有元素一样,只有在i和n之间调换了顺序;而恰巧$S^*$是中间的一个状态,那么上面两个条件是不是都满足了?严格来说,存在seq’,使得:
- 对于任意j, j< i, or i >= n: $e_j’ == e_j$
- i到n之间的event是seq的一个排列。($e_j, i \leq i < n$)
- j < i, or i $\geq$ n, $S_j’ == S_j$
- 存在k在i和n之间,使得$S^* == S_k’$
Proof
首先定义两个概念:prerecording event和postrecording event,因为event都是在节点上发生的。如果发生在节点做了snapshot,也就是record,之前,称为prerecording,反之postrecording。显然所有小于i的都是prerecording,大于n的都是postrecording。
现在假设这样一种情况,两个相邻的event,前者是postrecording,后者是prerecoding的。如果是在同一个机器上当然是不可能的;但是在不同机器上还是有可能的。(仔细想想是不是)如果我们调换了这二者的顺序,对于结果是不会有影响的。
用反证法,不同节点上的event相互影响只能是发消息,且是前者发消息恰好被后者收到,这种情况下不能调换顺序。假设为$e_j, e_{j+1}$然而,前者是postrecording,所以之前一定有marker在同一个channel上发过了(因为算法的原因,一旦record节点,立刻向所有出边发送marker),根据channel先进先出的原则,这条消息到达之前,marker已经达到了。所以$e_{j+1}$只能是postrecording,矛盾。
所以$e_1,…e_{j-1},e_j,e_{j+1}…$ 和 $e_1,…e_{j-1},e_{j+1},e_j$的效果是一样的。数学归纳法,我们最终可以得到一个序列,使得所有的prerecording的event都在前面。我们设pre和post的event中间的状态是$S^*$
接下来可以证明:
- 对于每个节点,$ S^* $和真实世界里每个节点record的时候一样(定义,都是执行完所有prerecording event)。也就是说$ S^* $ 中节点的状态和snapshot得到的节点状态是一致的。
- 对于每个channel,$S^* $记录的状态是(prerecording的event 发送的message)- (prerecording的event 收到的message)。表示这些信息已经被发送了但是没有被接受,正在网络上飞。而之前算法里,记录的是在接受节点record之后,收到marker之前的所有message。这些信息正好就是prerecording 发出的信息,减去prerecording 收到的信息。因为marker之前的信息都是prerecording发出的信息;而prerecording收到的信息,没有被算法记录!所以snapshot算法的channel部分和
至此所有问题全部解决。
5. stability detection
回到之前的论点,对于死锁检测等问题,对于判断函数y,y(S)可以推导出y($S^*$),所以可以用snapshot的状态来测试S的状态。这就是snapshot的用处。